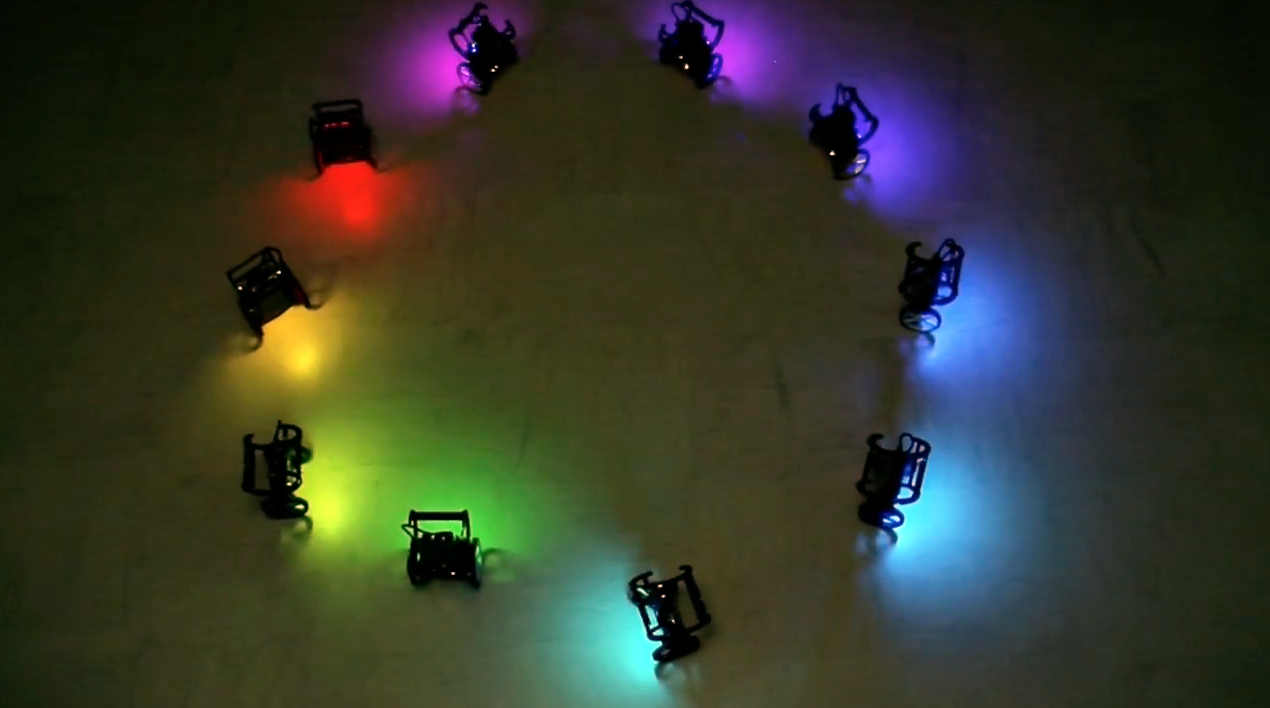
Drones that sync and swarm
Scientists of the doctoral school “Networked Autonomous Aerial Vehicles” implemented a self-adaptive swarm of drones and showcased it in Klagenfurt’s new drone hall, one of the largest and most modern facilities of its kind.