Deadlocks in the synchronization of oscillators
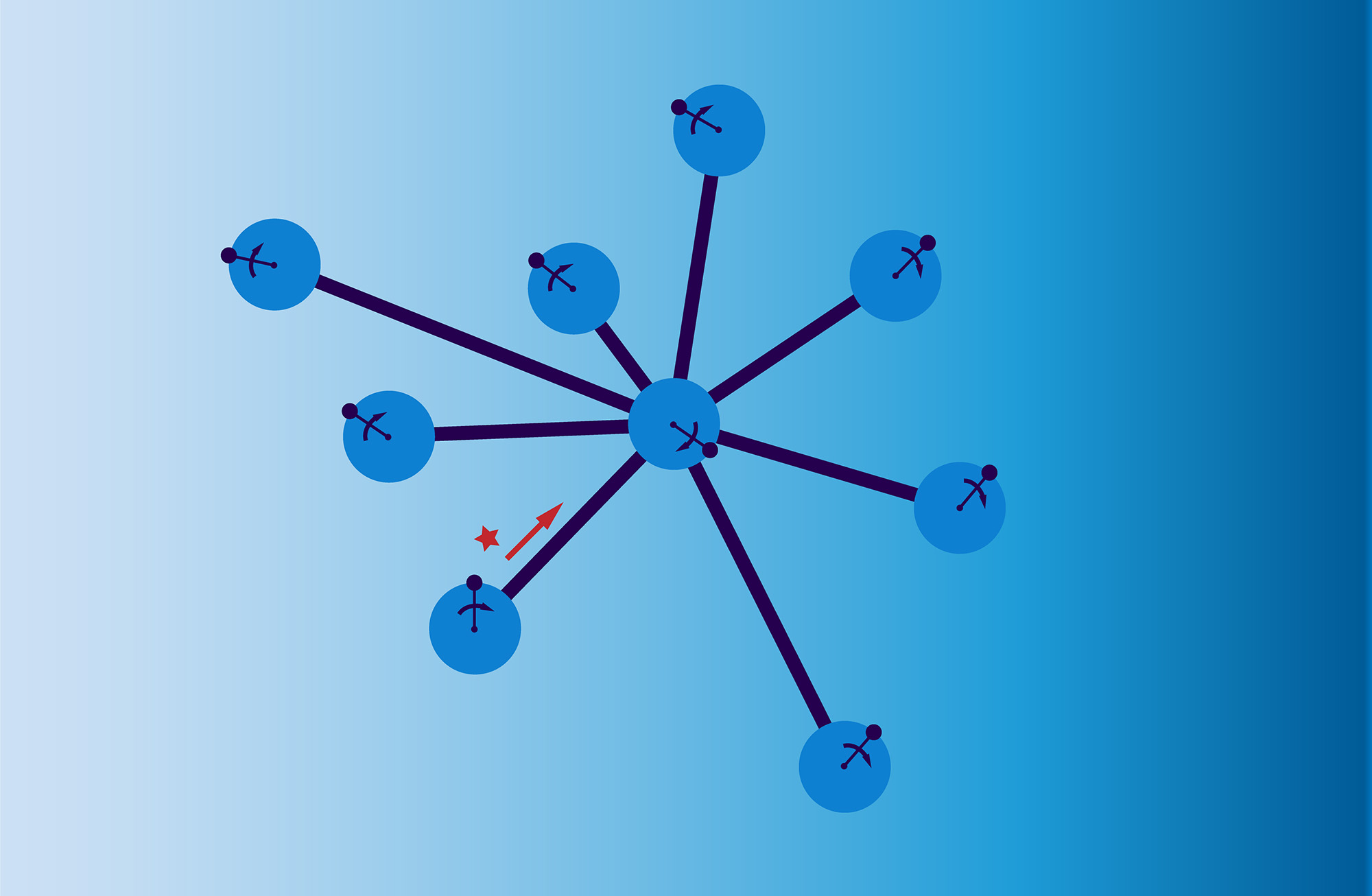
Certain oscillator networks suffer from deadlocks that prevent them from synchronizing. We derived the likelihood for such constellations in star graphs and found that they also occur in random graphs.
Certain oscillator networks suffer from deadlocks that prevent them from synchronizing. We derived the likelihood for such constellations in star graphs and found that they also occur in random graphs.
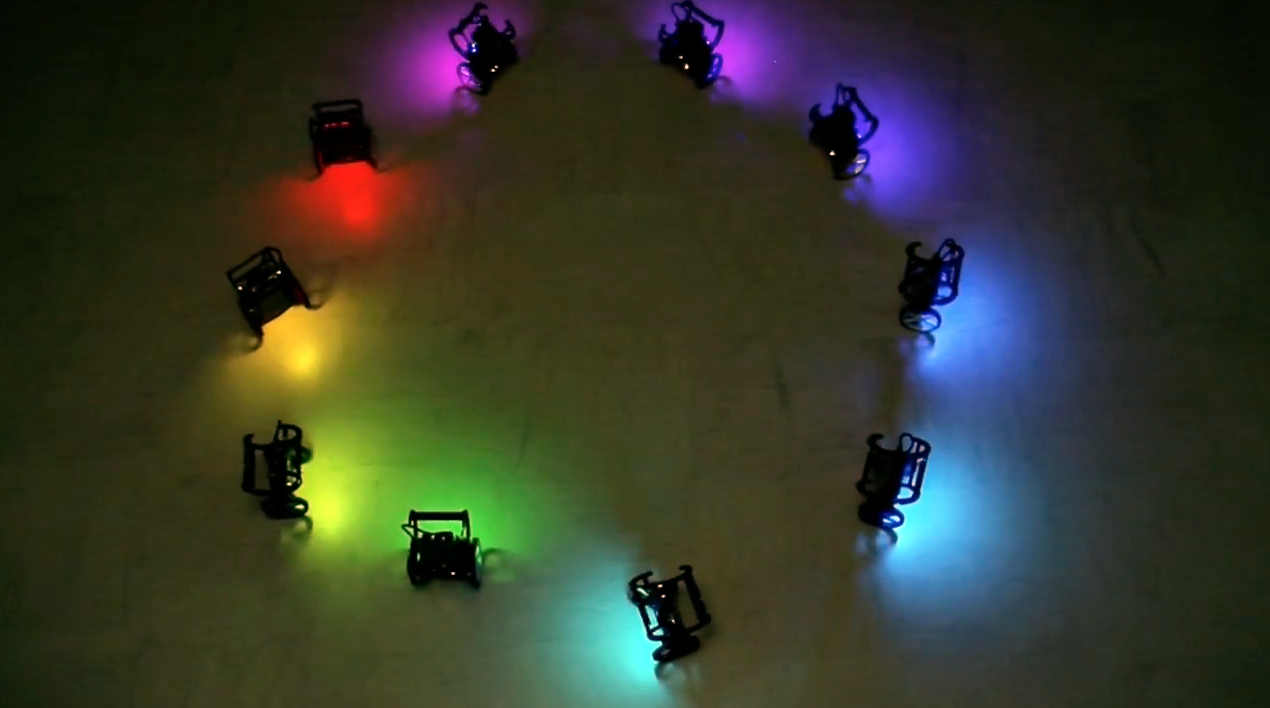
The swarmalator model for systems in which synchronization and swarming are coupled is implemented and studied for the first time in a technical system.

Wherever several clocks tick simultaneously, it is tricky to get them all to display precisely the same time. This can be a challenge for drone swarms that are airborne together. To tackle this problem, young scientist Agata Barciś is developing new technologies.
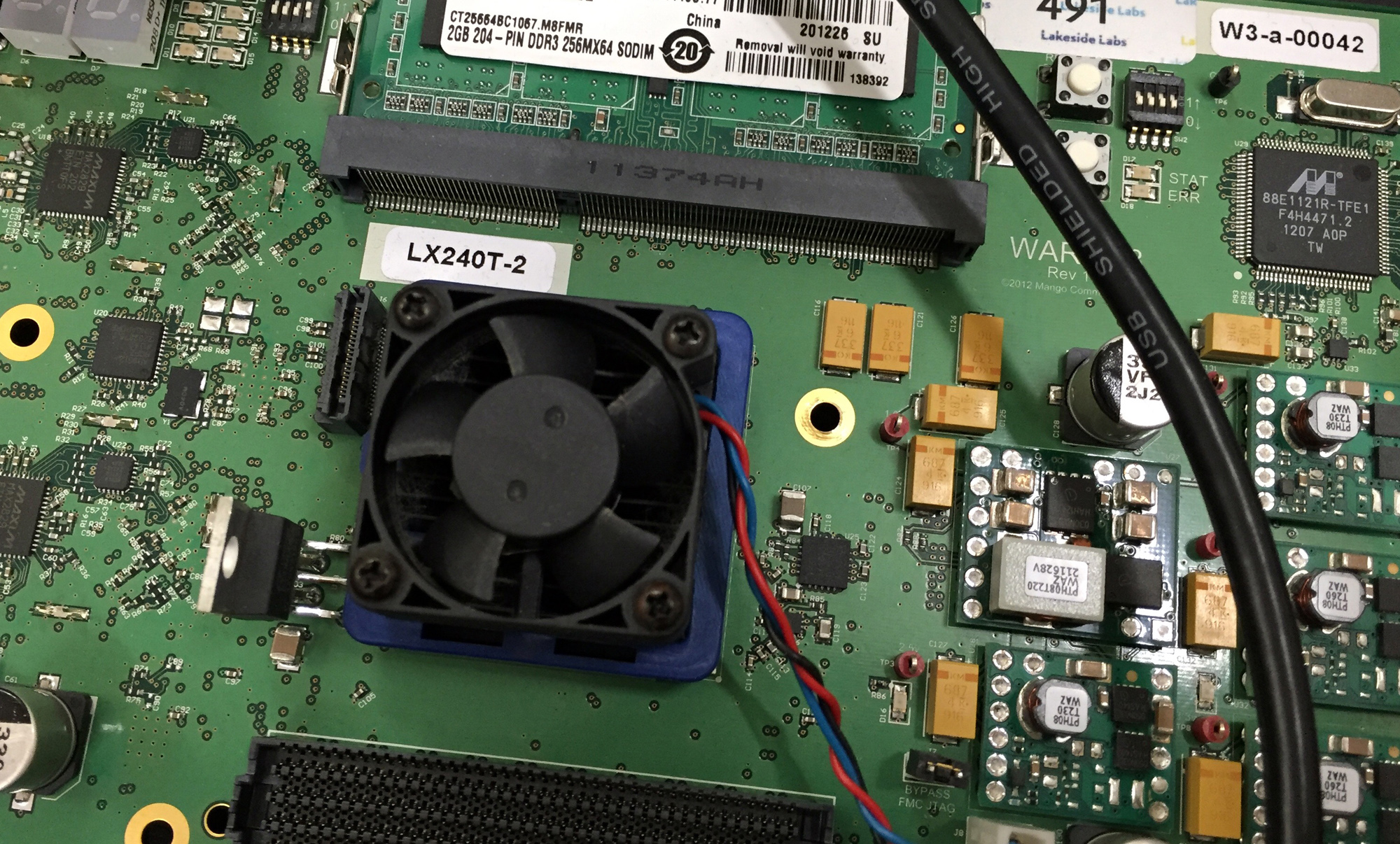
Synchronization algorithms based on the theory of pulse-coupled oscillators are evaluated on programmable radios. It is experimentally demonstrated that the stochastic nature of coupling is a key ingredient for convergence to synchrony. We propose a distributed algorithm for automatic phase rate equalization and show that synchronization precisions below one microsecond are possible.