
Drone height estimation from 5G signals
A drone’s flight height can be estimated from radio signals of base stations. Simulations yield an accuracy of about two meters. Ongoing flight experiments aim to validate the technique in real 5G networks.
A drone’s flight height can be estimated from radio signals of base stations. Simulations yield an accuracy of about two meters. Ongoing flight experiments aim to validate the technique in real 5G networks.

We employ the swarmalator model to make a group of entities align in a self-organized way along one or more circles.

Aerial drones connected to cellular networks can affect the throughput of common cell phone users. System-level simulation results were presented at an ACM MobiSys workshop earlier this week.

Let’s imagine a large region affected by an earthquake that needs to be combed for missing persons. Because buildings remain at risk of collapsing, this is a task that is particularly well-suited to robots. Micha Sende addressed this kind of scenario in his doctoral thesis. Written by Romy Müller for the University of Klagenfurt. Feature photo by Romy Müller. “What is special about this is that all the robots have the same role, in other words, no-one acts as coordinator,” Micha Sende explains. His research focuses on energy autonomy, asking questions such as: How much energy do I have left? How much energy do I still need to complete a specific task? How long can I continue to work, and when do I need to recharge? Which charging station should I head for, and which one is free at the moment? When asked what makes this task rather complex, Micha Sende answers: “A robotic lawnmower or a robotic vacuum cleaner have a comparatively easy job. They know the territory and they usually work alone, not …

Pasquale Grippa recently completed his doctorate in technical sciences. He spoke to us about his research focus—improving autonomous transport systems with the help of artificial intelligence.

The aviation industry is interested in wireless solutions for in-plane connectivity to improve safety and reduce airplane cost and weight. Ultra-wideband (UWB) seems to be a suitable technology for this purpose due to low power consumption, high data rate, and coexistence with other systems.

Commercial drones usually come equipped with modest on-board computing power. Consequently, their speed and agility are somewhat limited when they use their cameras like eyes to navigate in space. Samira Hayat, a researcher at the Department of Information Technology, recently joined forces with colleagues from other departments and Deutsche Telekom to investigate the effects of offloading computation to the edge of the network (edge computing).
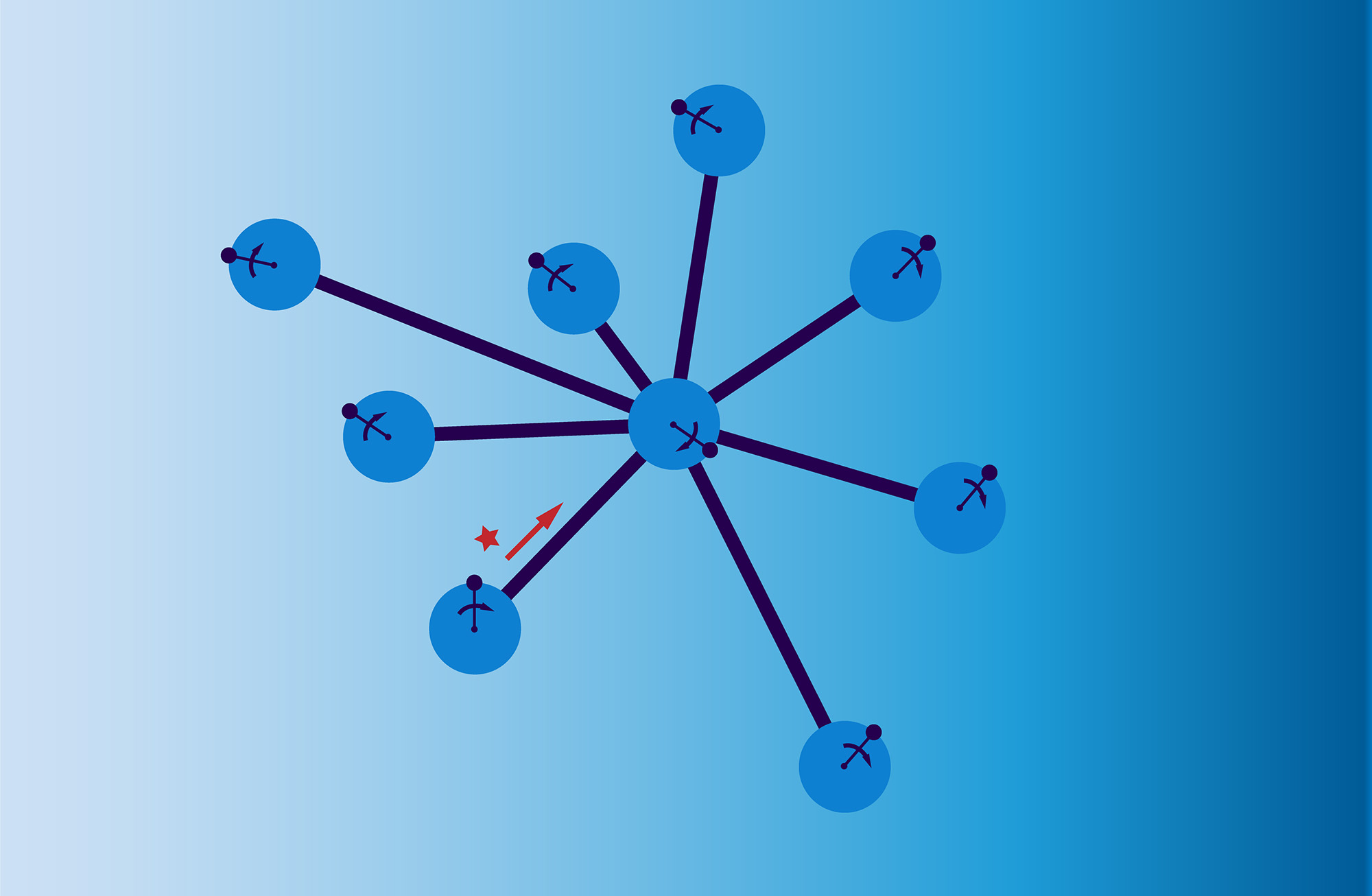
Certain oscillator networks suffer from deadlocks that prevent them from synchronizing. We derived the likelihood for such constellations in star graphs and found that they also occur in random graphs.

It might soon become common for drones to transport goods and people, monitor disaster zones, and bring various forms of relief to areas that are difficult to access. Which communication infrastructure is best suited to facilitate this? Researchers at the University of Klagenfurt have explored potential challenges associated with the use of traditional cellular networks.
A transport system with passengers traveling between stations in periodically arriving cabins is considered. We propose and evaluate an access control algorithm that dynamically limits the number of passengers who are allowed to board the current cabin. Simulation of a ski lift using empirical passenger data suggests that such access control can balance out the average waiting times at different stations. The algorithm works well with estimated values of the arrival and de-boarding rates.