
Circular patterns in swarmalator systems
We employ the swarmalator model to make a group of entities align in a self-organized way along one or more circles.
We employ the swarmalator model to make a group of entities align in a self-organized way along one or more circles.

Judith Wieser and Melisa Midžan were honored for their bachelor and master theses on robot swarms for search and collect missions.

Scientists of the doctoral school “Networked Autonomous Aerial Vehicles” implemented a self-adaptive swarm of drones and showcased it in Klagenfurt’s new drone hall, one of the largest and most modern facilities of its kind.
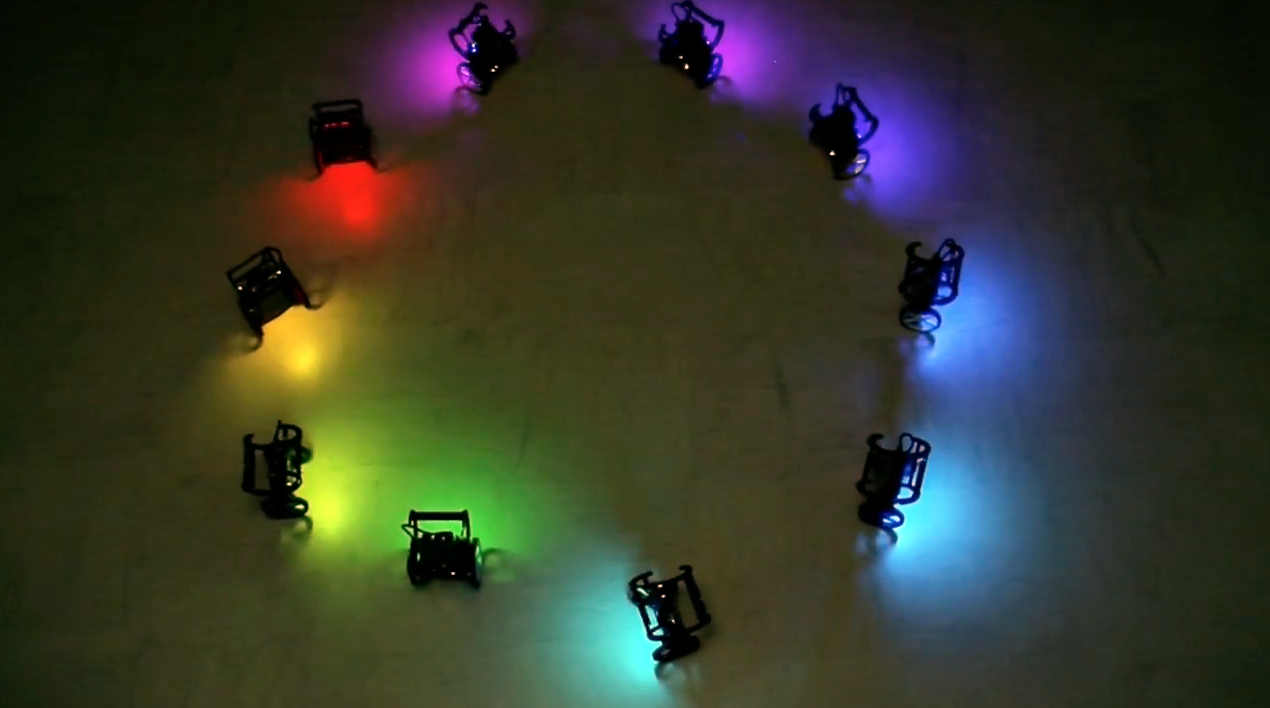
The swarmalator model for systems in which synchronization and swarming are coupled is implemented and studied for the first time in a technical system.

A multidisciplinary team at the University of Klagenfurt is due to deliver initial insights on the efficient operation of a drone-based delivery network. Doctoral student Pasquale Grippa will present the results at the Robotics: Science and Systems event taking place at MIT this week.

An interdisciplinary workshop on self-organization and swarm intelligence in cyber physical systems was held at Lakeside Labs this week. Experts presented their work and discussed open issues in this exciting field.
Samira Hayat and I attended re:publica 2017 in Berlin. It was an exciting event not least because Samira gave a very personal talk about drones and their application in disaster response.

It was an honor and pleasure of visiting the Center for Aerial Robotics Research and Education (CARRE) in Toronto. I gave a talk on wireless communication and job selection for drones and discussed research topics with many awesome colleagues.

We highlight research issues for wireless networking in aerial systems consisting of multiple small autonomous drones. Among these challenges are video streaming, synchronization, security and safety, and interference management.

Mobile robots in explorer missions need to charge their batteries from time to time. Different policies for coordinated recharging in teams of robots are evaluated.