The swarmalator model for systems in which synchronization and swarming are coupled is implemented and studied for the first time in a technical system.
Written by Agata Barciś, Michał Barciś, and Christian Bettstetter
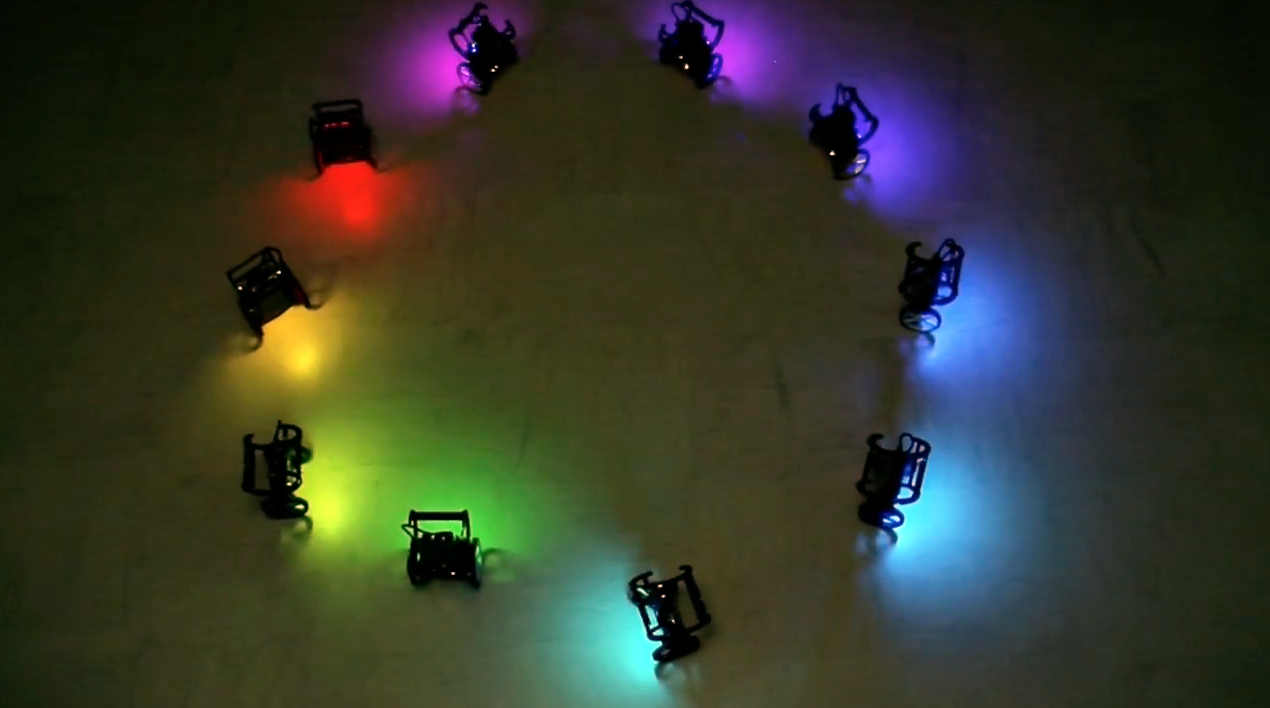
Two exciting phenomena of self-organization occurring in natural and technical systems are synchronization and swarming. In simple words, synchronization is coordination in time, and swarming is coordination in space. Scientific work on these phenomena remained mostly disconnected until a unified mathematical model for entities that both synchronize and swarm was proposed. These entities, called swarmalators, are “oscillators whose phase dynamics and spatial dynamics are coupled.” A swarmalator’s phase dynamics results from location-dependent synchronization, and its spatial dynamics results from phase-dependent aggregation. Groups of swarmalators show visually appealing spatio-temporal patterns, including phase waves and cluster formations.
{kind=link}
Our work aims to transfer and adapt the swarmalator model to mobile robotics and employ it in real-world systems. Our work realizes and studies, for the first time, the concept of swarmalators in a technical system. To do so, we modify and extend the original swarmalator model to account for the specific movement properties of robots (namely collision avoidance and constraints in the movement directions) and implement this extended model in the Robot Operating System 2 (ROS2). Simulations and experiments with small robots demonstrate the feasibility of the model and show its potential to be applied to real-world systems. All types of space-time patterns achieved in theory can be reproduced in practice.
We envision many applications for swarmalators in robotics. In monitoring and surveillance, the model can coordinate robots during a patrolling mission or gather them around a point of interest. Depending on the specific tasks, the coupling of phase and position can be utilized in different ways. For instance, robots can take consecutive pictures of the point of interest from different viewing angles, or position-dependent communication slots can be assigned. In exploration, a group of underwater vehicles can swim in a formation with the movements of their fins synchronized to improve performance. In art and entertainment, swarmalators can draw artificial paintings and perform aerial light shows with drones.
Publication
Agata Barciś, Michał Barciś, and Christian Bettstetter. Robots that Sync and Swarm: A Proof of Concept in ROS 2. In Proc. IEEE Intern. Symp. on Multi-Robot and Multi-Agent Systems (MRS), New Brunswick, NJ, USA, August 22–23, 2019. Download arXiv preprint.
The text of this blog entry is based on the introduction of the mentioned paper written by the authors. The research has been performed as part of the Karl Popper Kolleg at the University of Klagenfurt. Project funding has been received by the Austrian Science Fund FWF (grant P30012-NBL). The text was updated in October 2019.