
Drone height estimation from 5G signals
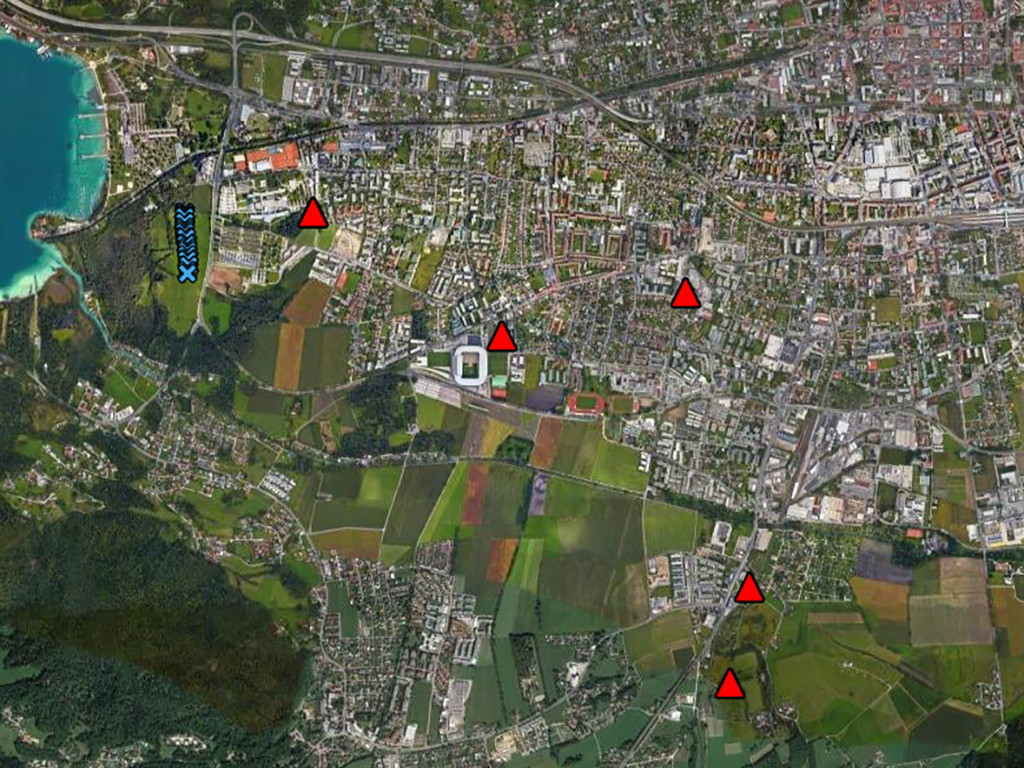
A drone’s flight height can be estimated from radio signals of base stations. Simulations yield an accuracy of about two meters. Ongoing flight experiments aim to validate the technique in real 5G networks.
A drone’s flight height can be estimated from radio signals of base stations. Simulations yield an accuracy of about two meters. Ongoing flight experiments aim to validate the technique in real 5G networks.

Judith Wieser and Melisa Midžan were honored for their bachelor and master theses on robot swarms for search and collect missions.
A new project investigates the integration of unmanned aerial vehicles in 5G networks and proposes a hybrid connectivity solution with Wi-Fi. The work is led by Aymen Fakhreddine and advised by Christian Bettstetter. Funding comes from the Austrian Science Fund (FWF). Written by Christian Bettstetter and Aymen Fakhreddine Wireless connectivity is a fundamental component in drone systems with high demands for reliability, security, and performance. Some drone applications need to transmit huge amounts of data or require ultra-low latencies. The wireless technology used in most commercial drones is Wi-Fi, but it only partially meets the high requirements. Therefore, integrating drones into cellular networks is an exciting option, either as a replacement or supplement to Wi-Fi. A new three-year research project at the University of Klagenfurt addresses this issue. Funding was secured from the Austrian Science Fund (FWF) in the amount of about 288,000 € from the ESPRIT postdoctoral program. The work is embedded into many ongoing activities on multi-drone systems in Klagenfurt (uav.aau.at). “The integration of drones into cellular networks has not yet reached the …

Let’s imagine a large region affected by an earthquake that needs to be combed for missing persons. Because buildings remain at risk of collapsing, this is a task that is particularly well-suited to robots. Micha Sende addressed this kind of scenario in his doctoral thesis. Written by Romy Müller for the University of Klagenfurt. Feature photo by Romy Müller. “What is special about this is that all the robots have the same role, in other words, no-one acts as coordinator,” Micha Sende explains. His research focuses on energy autonomy, asking questions such as: How much energy do I have left? How much energy do I still need to complete a specific task? How long can I continue to work, and when do I need to recharge? Which charging station should I head for, and which one is free at the moment? When asked what makes this task rather complex, Micha Sende answers: “A robotic lawnmower or a robotic vacuum cleaner have a comparatively easy job. They know the territory and they usually work alone, not …

Scientists of the doctoral school “Networked Autonomous Aerial Vehicles” implemented a self-adaptive swarm of drones and showcased it in Klagenfurt’s new drone hall, one of the largest and most modern facilities of its kind.

It might soon become common for drones to transport goods and people, monitor disaster zones, and bring various forms of relief to areas that are difficult to access. Which communication infrastructure is best suited to facilitate this? Researchers at the University of Klagenfurt have explored potential challenges associated with the use of traditional cellular networks.

Wireless communications is essential for many applications with commercial drones. Omid Semiari interviewed Christian Bettstetter about this exciting topic at the interface of communications and robotics for the latest IEEE ComSoc TCCN newsletter.

This statement was the title of a TIME article, which was included in the magazine’s special report on “The Drone Age”. We asked Christian Bettstetter to tell us what today’s drones can do and what drone (swarms) are not yet capable of. One thing is certain: Our airspace is going to be much busier in the future.
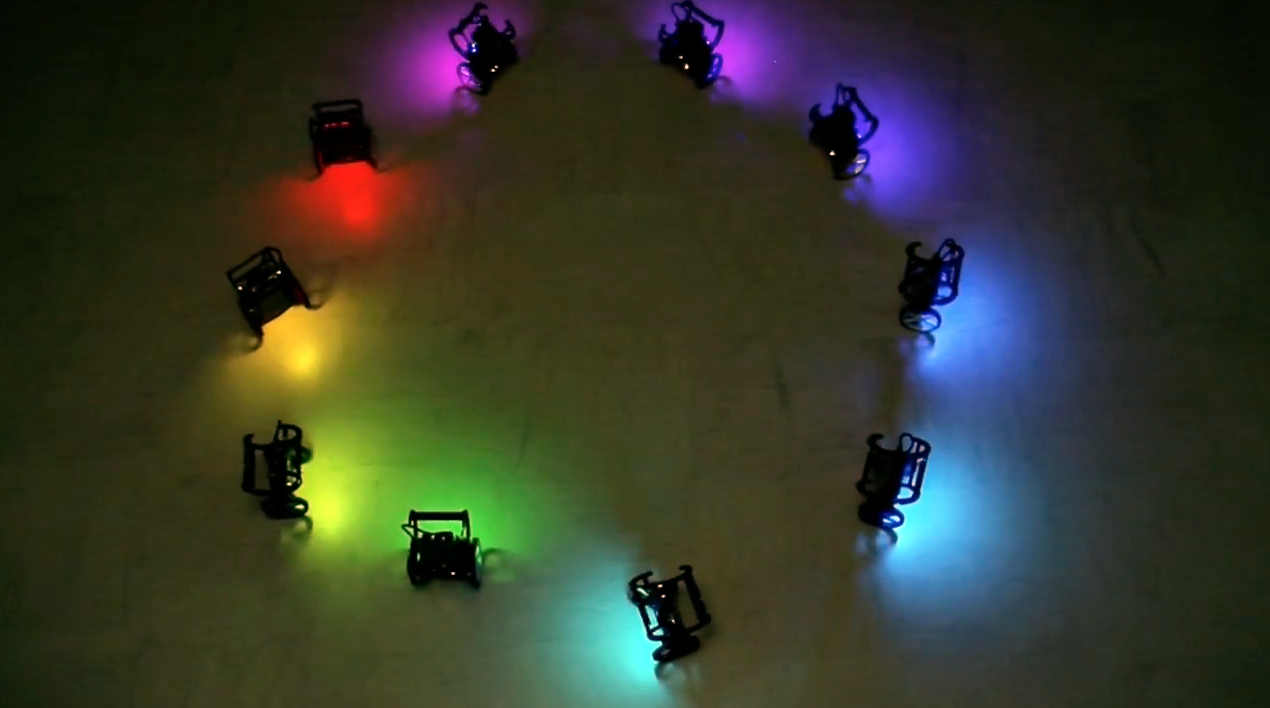
The swarmalator model for systems in which synchronization and swarming are coupled is implemented and studied for the first time in a technical system.