Deadlocks in the synchronization of oscillators
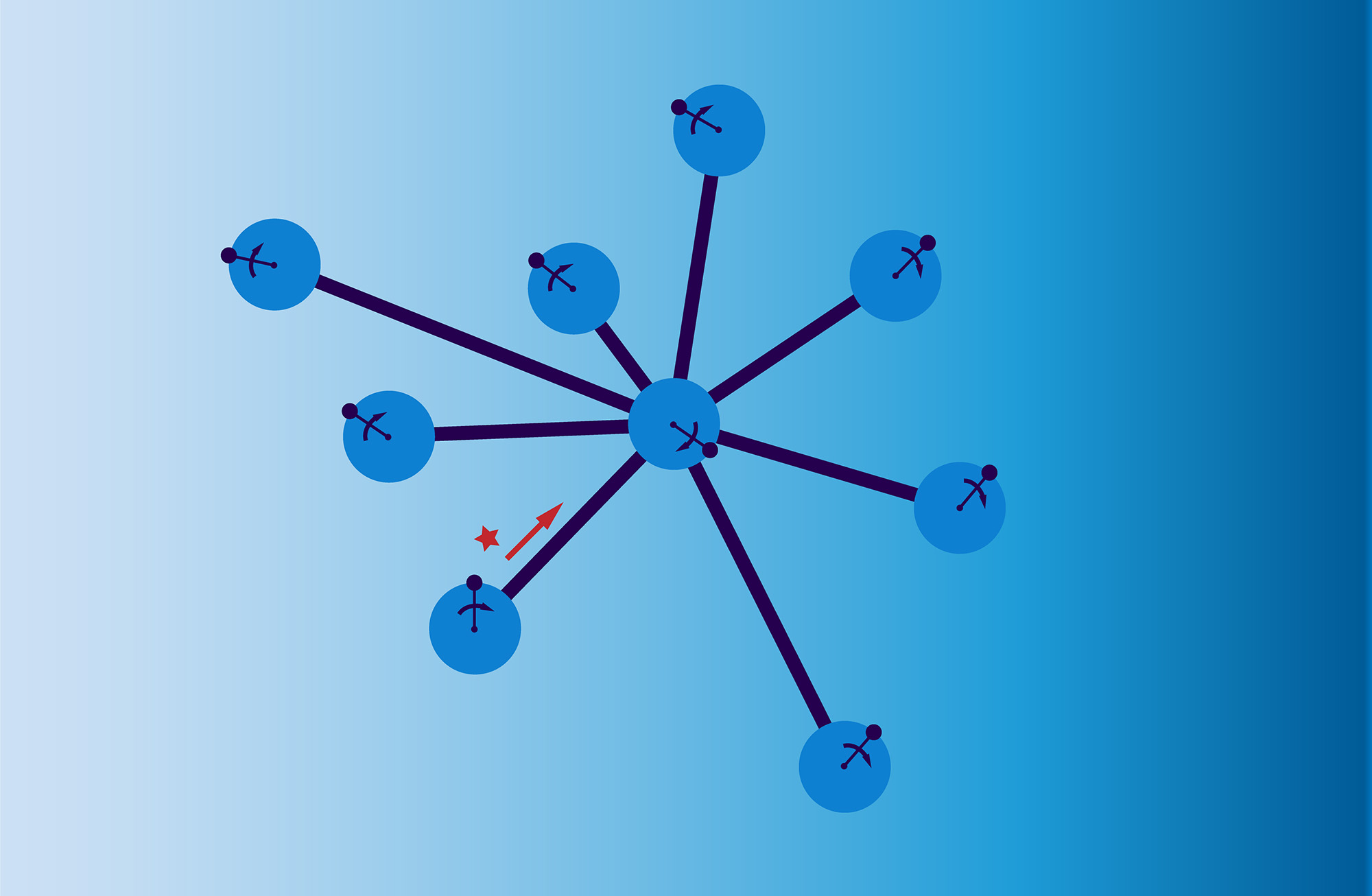
Certain oscillator networks suffer from deadlocks that prevent them from synchronizing. We derived the likelihood for such constellations in star graphs and found that they also occur in random graphs.
Certain oscillator networks suffer from deadlocks that prevent them from synchronizing. We derived the likelihood for such constellations in star graphs and found that they also occur in random graphs.
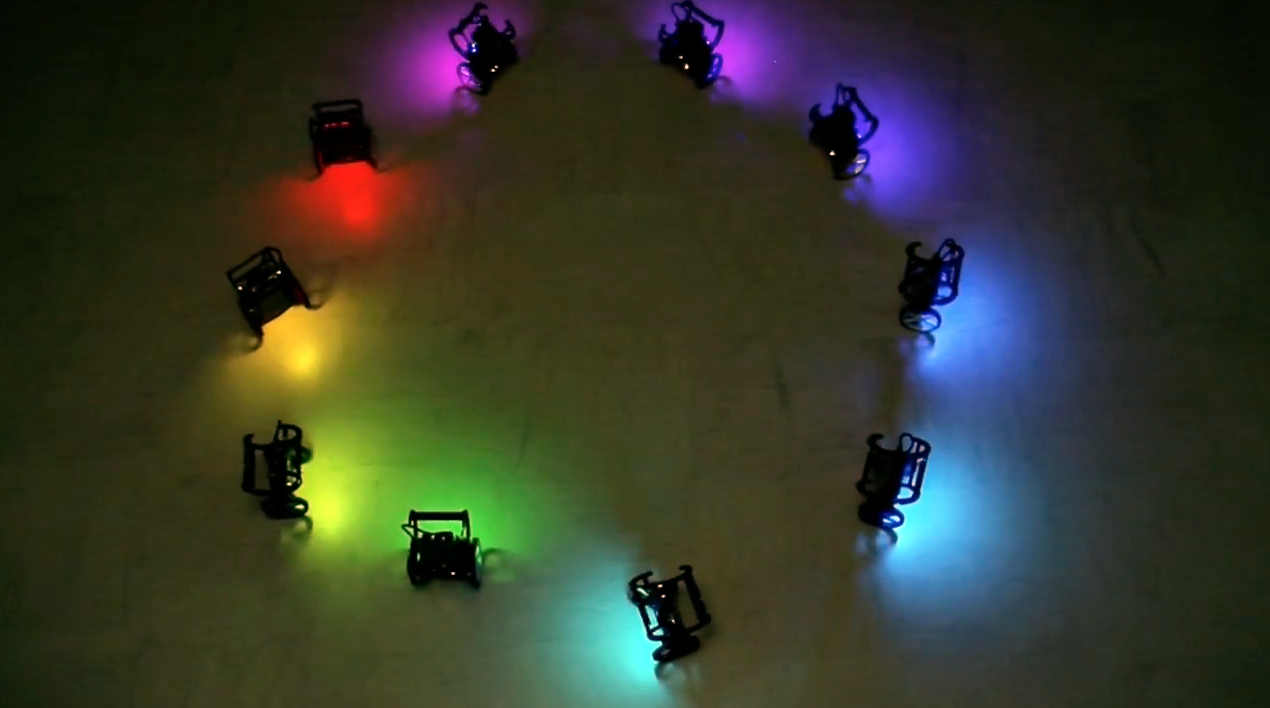
The swarmalator model for systems in which synchronization and swarming are coupled is implemented and studied for the first time in a technical system.

An interdisciplinary workshop on self-organization and swarm intelligence in cyber physical systems was held at Lakeside Labs this week. Experts presented their work and discussed open issues in this exciting field.

Mobile robots in explorer missions need to charge their batteries from time to time. Different policies for coordinated recharging in teams of robots are evaluated.