Self-fulfilling prophecies: What causes a bank to fail?
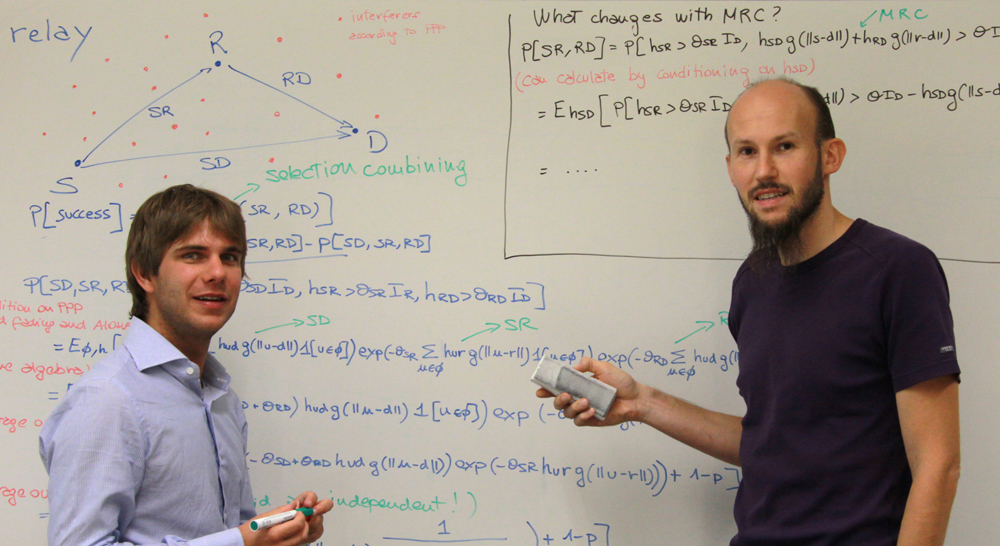
We talk about self-fulfilling prophecies when something we have predicted comes true as a result of our conscious and unconscious actions. Jack Bryson, [a doctoral student and] university assistant in the Ada Lovelace Program, is using modeling and simulations to find out which social science phenomena can cause banks to fail.