
“Research and cultural diversity widened my horizons.”
Pasquale Grippa recently completed his doctorate in technical sciences. He spoke to us about his research focus—improving autonomous transport systems with the help of artificial intelligence.
Pasquale Grippa recently completed his doctorate in technical sciences. He spoke to us about his research focus—improving autonomous transport systems with the help of artificial intelligence.

The aviation industry is interested in wireless solutions for in-plane connectivity to improve safety and reduce airplane cost and weight. Ultra-wideband (UWB) seems to be a suitable technology for this purpose due to low power consumption, high data rate, and coexistence with other systems.

Commercial drones usually come equipped with modest on-board computing power. Consequently, their speed and agility are somewhat limited when they use their cameras like eyes to navigate in space. Samira Hayat, a researcher at the Department of Information Technology, recently joined forces with colleagues from other departments and Deutsche Telekom to investigate the effects of offloading computation to the edge of the network (edge computing).
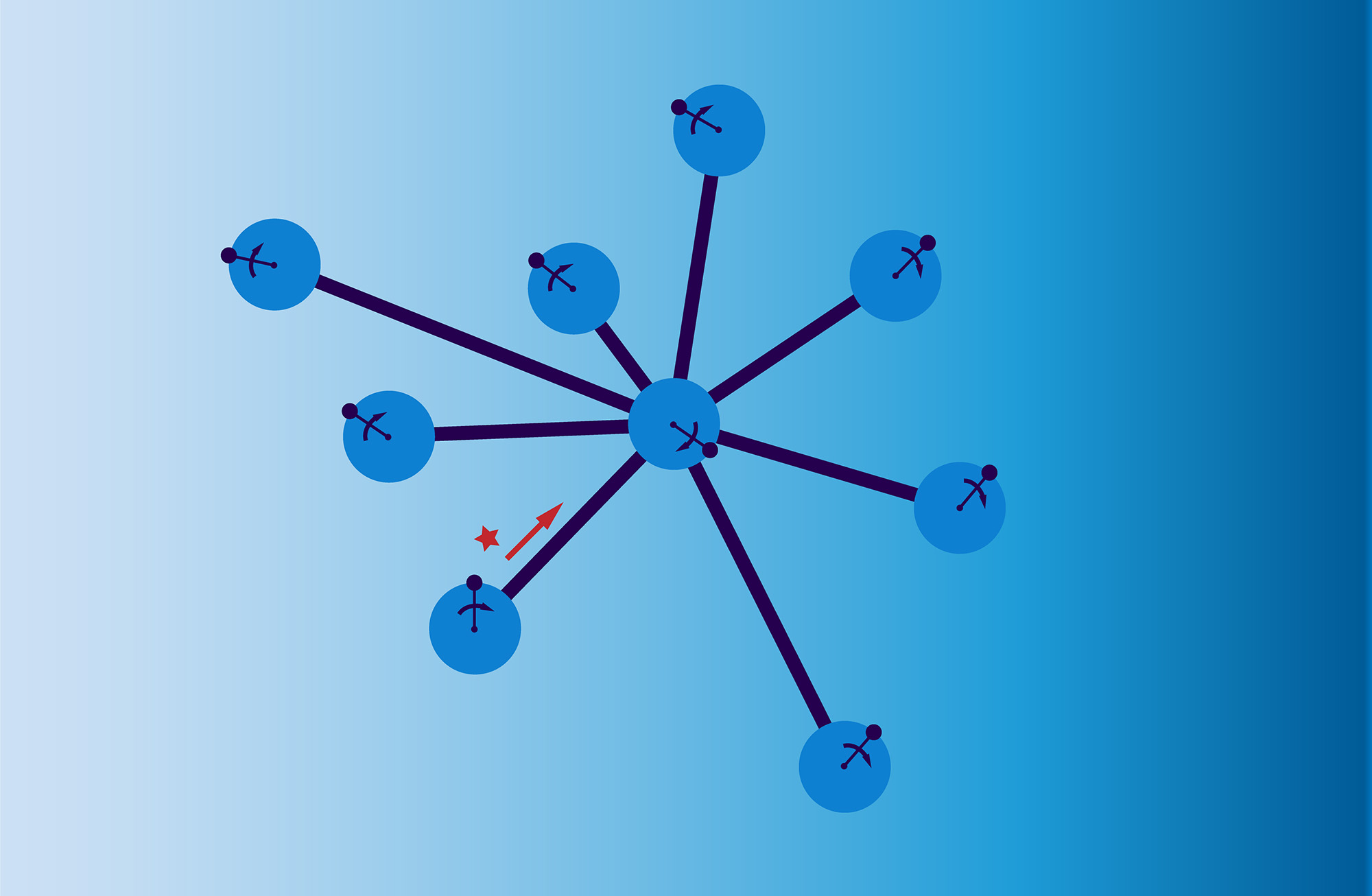
Certain oscillator networks suffer from deadlocks that prevent them from synchronizing. We derived the likelihood for such constellations in star graphs and found that they also occur in random graphs.

Scientists of the doctoral school “Networked Autonomous Aerial Vehicles” implemented a self-adaptive swarm of drones and showcased it in Klagenfurt’s new drone hall, one of the largest and most modern facilities of its kind.

The Mobile Systems Group of the University of Klagenfurt held a workshop on scientific writing. They discussed the typical parts of a paper along with specific challenges and practiced them in group work.

It might soon become common for drones to transport goods and people, monitor disaster zones, and bring various forms of relief to areas that are difficult to access. Which communication infrastructure is best suited to facilitate this? Researchers at the University of Klagenfurt have explored potential challenges associated with the use of traditional cellular networks.

A workshop about communication in swarms took place in Klagenfurt in mid-July. Invited speakers and other experts discussed questions at the interface of robotics, distributed systems, and communication technology.

A panel on the next generation of mobile communication systems was held in Klagenfurt. Experts from two network operators, a chip vendor, and research institutions discussed the opportunities and challenges of 5G.